Control Strategy
The strategy is to move the array, rain or shine. And point the array in the general vicinity of the sun. Pointing accuracy is not critical. If the accuracy is off by 10 degrees, the panel apparent area is reduced to cosine(10) = 0.98 . In other words, you lose 2% of the available power.
- -
-
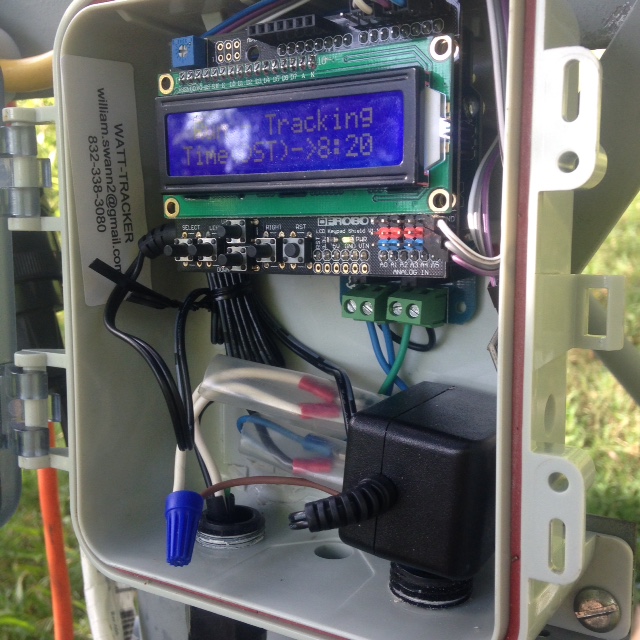
Description: 1 axis control box. There are 3 PC boards stacked. On the very top, there is an LCD / pushbutton board from DFRobot. I like it because it has an LCD, and 5 pushbuttons for control. The LCD is 2 x 16 characters. The board has analog inputs as well as digital outputs. The digital outputs control 2 solid state switches (bottom PC board, from SainSmart), which turn on the tilting motor. Below the LCD is an Arduino UNO. The tilt motor is bi-directional. It has 3 leads. One is connected to neutral voltage. The remaining 2 are for CW and CCW direction. Simply actuate one or the other of the solid state switches to place 110 volts on the remaining 2 connections to the motor. The above picture is of a version that uses a light sensor to estimeate the time. Currently I use a real time clock (RTC) with a 3.6 volt button cell battery instead of the light sensor.
Copy of Code for single axis tracker: The C code is made thru an IDE called Flowcode. E-mail me for questions. The next improvement in the code, is to incorporate an angle sensor, and use the 110 volt plug as the on/off switch. The intent is that if there is a power outtage, that the array will re-position it self, when the power is restored, dependent upon the time (if tracking) or go horizontal, if not in the tracking time window. Since the angle sensor will be mounted on the moving part, a strain relief on the electrical chord is important.
C Code for doing the math for computing the sun's azimuth and elevation for a particulat time, and latitude and longitude. If anyone would like to verify its accuracy, thank you.
Suggest d/l a time limited copy of Flowcode and looking at the 2 code examples for a single axis tracker or the Az/El computation, hotlinks (C Code) above.
E mail me for copies of the Flowcode version for a single axis tracker or for the Azimuth / Elevation math.
My e mail is william.swann2@gmail.com